自动调平系统
点击次数:5601 次 更新时间:2022-04-18
摘要:随着科技水平的进步,军工装备、测量设备、高精平台等对基准工作平台的水平精度要求越来越高。同时,根据阵地的迁移、工位的变更,要求产品实时、快捷地实现工作平台的自动调平、调平后刚性锁定,确保工作平台水平精度满足要求。当倾角超过允许值时,系统自动报警,同时停止自动调平运行,实现程序自保 ;当系统自动调平运行中,出现意外情况,可按下“停止”键,停止调平运行,实现人工急停,确保系统的双重自保。
本公司的自动调平系统通过不断改进与完善,自动调平系统已完成了系列化、模块化、国产化的设计,实现了机电式、电液式与三腿、四腿、六腿的自由组合,并完成了从一键式调平自动化到动态实时智能调平的飞跃。
关键词:调平系统;水平精度;调平算法;双重自保;离去角;实时调平。
引言
自动调平系统,是根据设计要求,将倾斜的工作平台,调整到与水平面平行,且达到设计的水平精度要求的设备。其中,可编程控制器PLC检测双轴水平传感器的X轴与Y轴的测量值,根据自动调平算法发指令,控制相应的控制器驱动对应的调平撑腿运行,实现系统自动调平。当系统的倾角小于设定值时,可编程控制器PLC发指令,停止调平撑腿运行,同时系统刚性锁定,调平指示灯亮,显示系统已完成自动调平。
1 三腿机电式自动调平台的组成及其工作原理
1. 1 三腿机电式自动调平台的组成
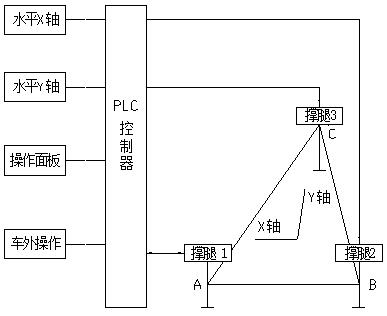
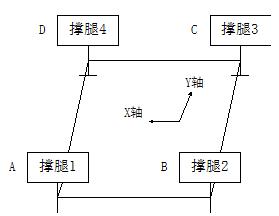
三腿机电式自动调平台主要由如下部分组成:控制系统由可编程控制器PLC及其外围电路组成;执行机构由三套调平撑腿及其传动机构等组成;测量机构由双轴水平检测器、调平撑腿极限行程检测开关组、温控仪等组成;其他器件包括操作面板、加热器、低压电源、空开、连接电缆、按钮及指示灯等。三腿自动调平台的组成示意图如图1。
1. 2 三腿机电式自动调平台的工作原理
系统上电后,首先进行初始化和自检:从非易失性存储器中读取当前工作平台X轴和Y
轴的倾角信息,更新系统各部分的状态,检测系统内部及其通讯是否正常,检测系统各部分状态是否正常。
图1 三腿自动调平台的组成示意图
当系统接收到“调平”指令时,可编程控制器PLC,首先检测工作平台的X轴和Y轴的
倾角信息,根据X轴的调平算法和Y轴的调平算法,控制对应的调平撑腿做相应的运行,进行工作平台X轴和Y轴的调平,从而实现系统自动调平。通过调平撑腿限位开关组,可以检
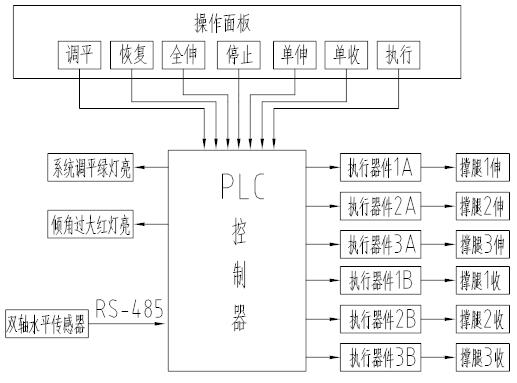
图2 三腿自动调平台的控制原理框图
测调平撑腿的行程信息,实现对调平撑腿的行程控制和行程保护。系统自动调平后,调平指示灯亮,调平系统刚性锁定,确保工作平台的水平精度。三腿自动调平台的控制原理框图如图2。
1. 3 三腿机电式自动调平台的主要功能
三腿自动调平台具备以下性能指标:平台点动全升、恢复、单腿点动升降、调平撑腿过行程保护、水平监测、自动调平、双重自保、刚性锁定等操作功能,具体指标如下。
2.1 调平精度 ≤0.05°。
2.2 调平时间 ≤ 50s。
2.3 电动推杆行程:100mm~200mm。
2.4 系统承载承载:200Kgf~400Kgf。
2.5 自动报警:相对坡度大于设定值时,系统自动报警,红灯亮。
2.6 实时显示:实时显示工作平台角度。
2.7 自动调平:系统自动调平工作平台。
2.8 调平显示:工作平台相对坡度不大于0.05°,绿灯亮,显示系统已调平。
2.9 平台全升:工作平台整体上升。
2.10 单动点动升降功能:调平撑腿单独升降工作平台。
2.11 恢复功能:恢复系统初始状态,调平撑腿全部回收,直到工作平台达到最低位置,调
平撑腿得回收极限行程开关信号而停止。
2.12 双重自保:倾角过大,程序停止系统调平运行;按“停止”键,停止系统调平运行。
2.13 刚性锁定:系统完成自动调平,刚性锁定调平撑腿。
1. 4 三腿机电式自动调平台的自动调平模式
调节一个平面到水平状态的模式有两种:
(1)单向调节,即先将X方向调平,再将Y方向调平;或相反,先将Y方向调平,再将X方向调平。其特点是协调性好,但调节时间长。
(2)多点调节,即各点都同时运动,都调整到各自的预定点。其特点是速度快,算法复杂。
采用三点支撑的工作平台近似为刚性结构,采用模式(2)进行系统调平时,因每个调平撑腿的位移、速度均不相同,其运动相互制约,具体控制算法难以实现。而且由于每个调平撑腿的受力不一样,容易导致发生电机过载现象。因而,选用模式(1)进行调平。
由于调平过程,是调节三点的相对高度,因此,有三种调平方法:
(1)向最高点看齐,即保持最高点不动,把低点调高,只有上升运动。
(2)向最低点看齐,即保持最低点不动,把高点降低,只有下降运动。
(3)向中点看齐,即把要调节的各点向中点运动,调节动作有升有降。
从效率上考虑,方法(3)最省时,但由于有的调平撑腿已回收到极限位置而系统仍未调平。方法(2)也会产生上述问题。采用方法(1)调平时,调节方向和降腿动作方向一致,能消除执行机构的反向间隙的影响。提高了系统的调平精度。
1. 5 三腿机电式自动调平台的自动调平过程
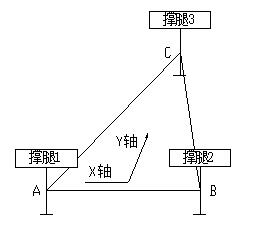
在开启电源后,控制系统开始进行调平,其工作平台示意图如图3所示。
图3 工作平台示意图
通过双轴水平检测器的检测信号,根据自动调平算法,可以测算出工作平台的最高点。若调平撑腿着地后A点为最高点(其他点为最高点的情况与A点相似),根据双轴水平传感
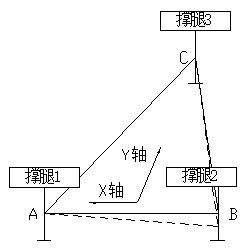
图4 工作平台X轴调平示意图
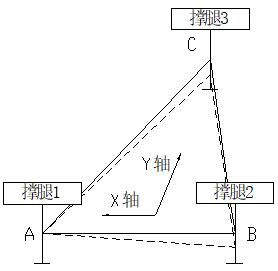
器的信号,可以分别进行X轴和Y轴方向的调平。如先进行X轴方向的调平,其过程如下:
调平撑腿1、3不动,调平撑腿2上升一定位移,即工作平台绕轴线AC旋转,如图4所示。其数值由控制系统根据双轴水平检测器的X轴方向反馈值决定,直至X轴方向调平。
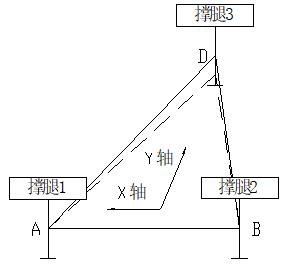
图5 工作平台Y轴调平示意图
在X轴水平后,调平撑腿1、2不动,调平撑腿3上升一定位移,即工作平台绕轴线AB旋转,如图5所示。上升的数值由控制系统,根据双轴水平检测器的Y轴方向反馈值决定,直至Y轴方向调平。
如工作平台的X轴和Y轴方向倾角都调整到设定值范围内,且合成角θ小于设定值,则可以认为工作平台已处于水平状态,工作平台实际调平示意图如图6。
图6 工作平台实际调平示意图
1. 6三腿机电式自动调平台的自动调平算法
根据系统实际情况,可以考虑两种调平算法:
(1)开环调节,即计算出其他三点和最高点的高度差,可编程控制器PLC控制各调平撑腿运行至相应高度,实现工作平台调平。
(2)闭环调节,即在低点调平撑腿伸出过程中实时检测工作平台的X轴和Y轴方向的倾角,不断调节调平撑腿伸出量。当工作平台的X轴和Y轴方向的倾角都调节到设定值范围内时,且合成角θ小于设定值,可以认为工作平台已调平。此时,调平撑腿停止运动,系统自动调平过程结束。
开环调节算法,要求工作平台是一个理想的刚性平面,工作平台无扭曲变形。三支调平撑腿安装一致,并且,每支调平撑腿必须跟工作平台垂直,调节过程中工作平台绝对无变形。
上述条件在实际操作中是无法保证的,因而该方法也无法采用。
闭环调平算法在调平过程中是反复进行“测量―调平”过程,因而对控制对象的一些软参数要求不高,实际调平效果好。实际上自动调平台本身是一个闭环系统。
可编程控制器PLC根据双轴水平检测器测出的工作平台的倾角,来控制执行机构的动作和位移,因而,采用闭环调平算法很容易实现工作平台的自动调平。
如工作平台处于非理想状态:
(1)工作平台受力不均产生扭曲变形。
(2)电动推杆不垂直导致电动推杆的升降不同步。
(3)三支电动推杆不平行。
(4)电动推杆的传动机构的间隙和误差不均匀等。
对于这些非理想状态的影响。闭环调平算法也容易实现三腿自动调平台的自动调平。

2 四腿电液式车载自动调系统的组成及其工作原理
2. 1 四腿电液式车载自动调系统的组成
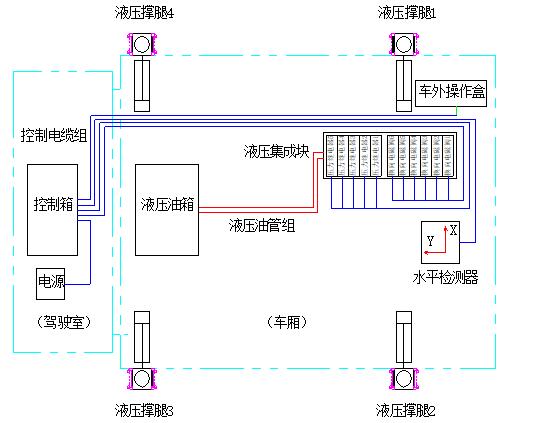
四腿电液式车载调平系统组成如图10所示。该系统由1套控制箱、1套控制模块、车外操作装置、4套液压撑腿、4套水平展开液压机构、1套双轴水平传感器、一组压力继电器、液压集成块、油箱、液压站及其附件等组成。液压撑腿由液压缸、液压锁和安装座等结构件构成;控制箱由PLC控制器、低压电源、操作面板、继电器、保护设备、按钮及指示灯等构成。
图10 四腿电液式车载自动调平系统的组成示意图
四腿电液式车载自动调平系统各部分的作用如下:
1)液压撑腿(1/2/3/4):调平系统的执行机构。
2)PLC控制器:调平系统的控制核心。控制命令通过控制器发出,同时采集反馈信号,使各个物理量构成一个个相对独立的闭环控制系统。
3) 水平传感器:用于测量工作平台与水平面的夹角(X轴/Y轴)。
4)远程接口:车外操作装置实现车外操作。
5)操作面板:人机交流界面。用于输入控制命令,显示系统状态。
6)低压电源:用于系统各部分低压供电。
2. 2 四腿电液式车载自动调平系统的工作原理
由于三点确定一个平面,在实际的调平过程中,四腿电液式车载自动调平系统,有时会出现一个液压撑腿悬空的现象。因此,液压撑腿水平展开到位后,系统调平工作前,首先进行所有的液压撑腿“着地”,并对液压撑腿进行压力检测。液压撑腿伸出过程中,当液压撑腿压力达到设定压力时,汽车轮胎处于半着地状态,压力继电器发信号给PLC控制器,PLC发指令停止液压撑腿运行。当液压撑腿(1、2、3、4)全部停止运行后,液压撑腿“着地”完成,系统进入自动调平状态。
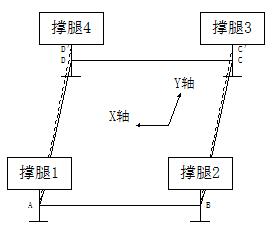
液压撑腿“着地”后,四腿电液式车载自动调平系统方可进行自动调平。四腿电液式车载自动调平系统布局图如图11。
图11 四腿电液式车载自动调平系统布局图
四腿电液式车载自动调平系统可以等效简化为图12。理想状态下,自动调平系统的工作平台可以视为一个刚性平台,于是:AB//CD,AB=CD ;AD//BC,AD=BC 。
图12 四腿电液式车载自动调平系统工作平台等效简化示意图
可编程控制器PLC接收水平传感器反馈的X轴和Y轴的角度信息,根据自动调平算法,可以测算出工作平台的最高点。假设液压撑腿着地后A点(撑腿1)为最高点。如图13。以水平面为基准,从A点向D点方向作水平线,从B点向C点方向作水平线。此时:
由于 AD//BC,AD=BC ;AD'//BC',AD'=BC'
因此 DD'=CC'。
图13 四腿电液式车载自动调平系统工作平台Y轴调平示意图
同步调整工作平台的C点(撑腿3)和D点(撑腿4),使两条撑腿同时上升DD'长度。此时AD和AD'重合,BC和BC'重合。则工作平台在Y轴方向处于水平状态。
如图14,在Y轴水平调整完毕后,以水平面为基准,从A点向B点方向作水平线,从D点向C点方向作水平线。此时:
由于 AB//CD,AB=CD ;
AB'//DC',AB'=DC'。
因此 BB'=CC'。
图14 四腿电液式车载自动调平系统工作平台X轴调平示意图
同步调整工作平台的C点(撑腿3)和B点(撑腿2),使两条撑腿同时上升BB'长度。此时AB和AB'重合,DC和DC'重合。则工作平台在X轴方向处于水平状态。
在理想状态下,当以上工作完成以后,工作平台处于水平状态。
同理,当B、C或D为最高点时,也可以采用同样的方法对系统进行自动调平。
其中,还有比较特殊的状态,即工作平台上存在两个最高点或四个点等高。当出现两个最高点时,可以判断工作平台的X或Y轴水平,此时只需将不水平的方向调平即可;四个点等高代表工作平台已水平,此时系统无需进行调平。
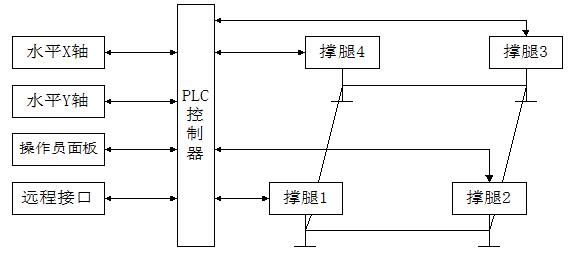
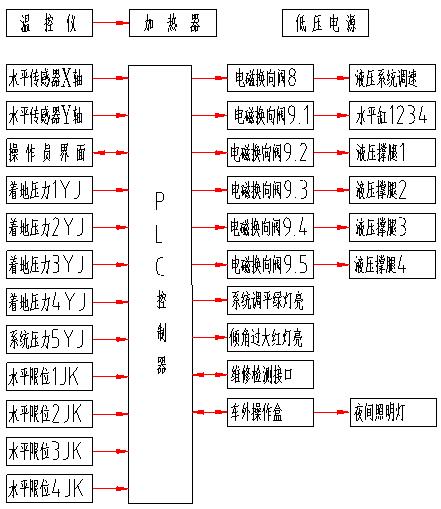
四腿电液式车载自动调平系统的原理框图如图15。
图15 四腿电液式车载自动调平系统的原理框图
2. 3 四腿电液式车载自动调平系统的主要功能
2.3.1 调平精度:≤0.1°。
2.3.2 调平时间:≤50s。
2.3.3 锁定性能:系统刚性锁定。
2.3.4 单腿额定承载:10T。
2.3.5 系统承载:30T。
2.3.6 单腿有效行程:500mm。
2.3.7 角度自动显示功能。
2.3.8 阵地倾角大于设定值自动报警。
2.3.9 车内外可操作功能。
2.3.10可靠性寿命:15年。
2.3.11平均无故障时间 MTBF>5000h。
2.3.12平均修复时间 MTTR<0.5h。
2.3.13预热时间:在-20℃以下预热时间应小于3Min。
2.3.14温度:工作温度:-40℃- +55℃,存储温度:-50- +70℃。
2.3.15工作高度:海拔3000m能正常工作。
2.3.16阵地要求:必须是平坦硬质的地基,相对坡度不大于设定值,否则下垫
钢板或枕木。
2. 4 四腿电液式车载自动调平系统的自动调平的模式、过程与算法
四腿电液式车载自动调平系统与三腿机电式自动调平台的自动调平模式、过程与算法基本类似,因此不再阐述。两者的主要不同点在于:
(1)四腿电液式车载自动调平系统,由于有四个撑腿,三点确定一个平面,因而可能在系统自动调平时,出现一个撑腿悬空。因此,系统自动调平前,需要先进行撑腿“着地”操作。
(2)四腿电液式车载自动调平系统,由于液压撑腿要“着地”,因而液压撑腿收起后,要核算液压撑腿的离地高度,以免影响汽车行驶中的离去角。而三腿机电式自动调平台,由于电动撑腿可以固定在车厢内或安装座上,因而只需要核算其安装空间即可。
3 六腿车载自动调平系统
六腿车载自动调平系统,可以根据设备具体的使用情况,将其中两个调平撑腿设计为
随动,便可将其等效为四腿车载自动调平系统,其自动调平模式、过程与算法,与四腿车
载自动调平系统相同。
4自动调平系统的系列化、模块化、国产化
4.1自动调平系统的系列化
随着自动调平系统的改进与完善,自动调平系统按传动方式有机电式、电液式 ;按调
平撑腿着地方式有车载自动调平系统、自动调平台 ;按调平撑腿数量有三腿、四腿、六腿
的自动调平系统 ;按系统承载重量有200Kgf、400Kgf、800Kgf机电式自动调平台,1T、
5T、10T、30T、50T的自动调平系统;按操作模式有一键式自动调平系统、智能化实时调
平系统。
4.1.1三腿机电式自动调平台
三腿机电式自动调平台,适用于室内、测量车内,只受重力、无侧向弯矩的小型测量设备工作平台的自动调平。其系统承载:100Kgf、200Kgf、300Kgf。调平精度:0.05°~0.1°。
三腿机电式实时智能调平台,在工作平台运行状态下,实时智能调平。适用于测量机器人、小型车载雷达系统,测量车的高精设备的自动调平。其系统承载:100Kgf、200Kgf、300Kgf。调平精度:0.1°~0.5°。
4.1.2四腿机电式自动调平台
四腿机电式自动调平台,适用于各类小型测量设备的自动调平。其系统承载:200Kgf、500Kgf、800Kgf。调平精度:0.05°~0.1°。
4.1.3四腿机电式车载自动调平系统
四腿机电式车载自动调平系统,适用于雷达座车、测量车、高精度工作平台等自动调平。其系统承载:2T、3T、5T、10T、20T、30T。调平精度:0.05°~0.1°。
4.1.4四腿电液式车载自动调平系统
四腿电液式车载自动调平系统,适用于雷达座车、火箭炮运输装填车、铁路装卸车等自动调平。其系统承载:2T、 3T、5T、10T、20T、30T。调平精度:0.2°。
四腿电液式实时智能调平台,在工作平台运行状态下,实时智能调平。适用于运输装填车、小型车载雷达系统、测量车的高精设备、矿机运输车的自动调平。其系统承载:5T、10T、20T、30T。调平精度:0.1°~0.5°。
4.1.5六腿电液式车载自动调平系统
六腿电液式车载自动调平系统,适用于轮式装甲车、矿山机械、铁路装卸车等自动调平。其系统承载:40T、50T。调平精度:0.5°。
四腿电液式实时智能调系统,在工作平台运行状态下,实时智能调平。适用于轮式装甲车、矿机运输车的自动调平。其系统承载:40T、50T。调平精度:0.5°。
4.2自动调平系统的模块化
本公司对不同系列组合产品,根据不同功能要求,完成了控制软件模块化设计、对各类推力、行程的电动撑腿和液压撑腿的安装接口、外形进行模块化设计。使类似产品的零部件、软件可以实现互换,便于产品的批量生产与维修。
4.3自动调平系统的国产化
随着我国的科技进步,为适应国防建设需要,我们响应军工产品国产化的要求,在器件选用中,尽可能选国产产品,力争我们研制的产品,其器件国产化率100%。
5自动调平系统的创新点与优点
自动调平系统的主要特点如下:
(1)实时检测,避免人为误判。水平传感器实时检测工作平台与水平面的夹角,只要角度发生变化,系统可及时自动调平,确保平台的高精度水平。
(2)自动调平,避免人为误动。当倾角水平精度超出要求时,根据调平算法进行自动调平。
(3)双重自保,安全性高。采用人工手动急停和程序自判急停双重保护,既可人工手动急停;又可通过程序自保,自动停机。
(4)刚性锁定,可靠性高。实现了系统的刚性锁定,确保系统自动调平后精度可靠。
(5)双速调平,高精高效。由于控制程序采用大倾角时高速调平,倾角小于设定值时低速精确调平,既保证了调平精度,又缩短了调平时间。